

![学納金サイト [在学生・保護者専用]](/assets/images/BlkFeatured_item_tuition.jpg)
School of Medicine見ている手が自分の手であるという身体意識と手の位置知覚は独立している
渋谷 賢(統合生理学教室 講師)
大木 紫(統合生理学教室 教授)
研究のハイライト
- 見ている手が自分の手であるという身体意識と、自分の手がどこに存在するかの位置知覚は複数の感覚(視覚、固有感覚、触覚など)の統合により生じるが、手に関する視覚-触覚入力のタイミングの操作がそれらに異なる影響を及ぼした。
- 見ている手が自分の手であるという身体意識と、自分の手がどこに存在するかの位置知覚は独立していることを明らかにした。
概要
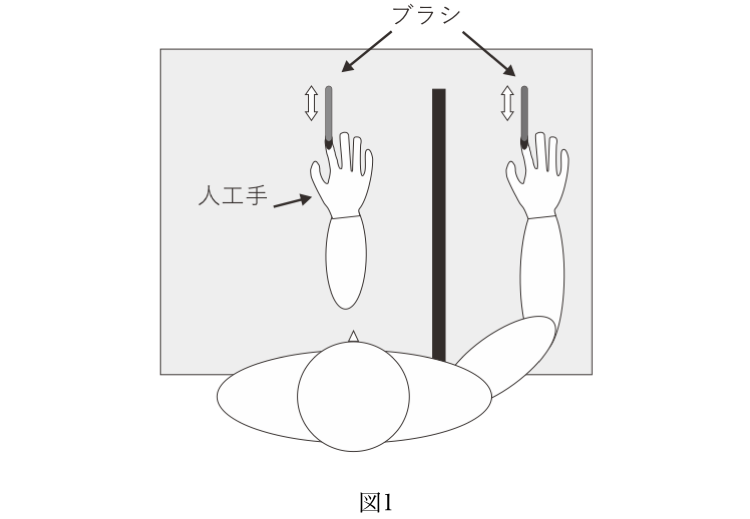
私たちは、”(見ている)手が自分のものである”と感じる身体意識を持っています。私たちの脳は複数の感覚(視覚、固有感覚、触覚など)を統合して、自分の身体部位が空間のどこにあるのかを推論しており、このプロセスが身体意識と深く関連します。しかし、感覚間に矛盾があると、脳は誤った推論を行ってしまい、病気の症状や錯覚を誘発する場合があります。健常者で生じるラバーハンド錯覚はその一つです。被験者の眼前に置いた人工手(ラバーハンド)と見えない位置に置かれた被験者の実際の手を実験者がブラシで同時に撫で続けると(同期刺激)、被験者は人工手の位置で触覚を感じ始め、最終的に人工手が本物の手のように錯覚します(図1)。しかし、実際の手と人工手を撫でるタイミングをずらすと(非同期刺激)、錯覚は生じません。またラバーハンド錯覚が生じている時、実際の手の位置を判断させると、その位置は錯覚が起きる前より人工手の方へ移動します。このときの身体部位の位置判断には筋肉、腱、関節などからの感覚(固有感覚)が使われており、このためこの現象を固有感覚ドリフトといいます。固有感覚ドリフトの前提条件として、①固有感覚入力(自分の手)と視覚入力(人工手)の視覚-固有感覚統合が関わり、更に②ブラシに伴う触覚入力(実際の手)と視覚入力(人工手)の視覚-触覚統合がこれに影響を与えると考えられています。しかし、②の影響について、視触覚刺激の同期入力が固有感覚ドリフトを高めるのか、非同期入力が固有感覚ドリフトを抑制するのかについては論争があります。
本研究は、ラバーハンド錯覚における視触覚刺激のタイミングのずれ(非同期入力)を予測できる状況と予測できない状況を設け、その影響を検討しました。具体的には、4種類のタイミングのずれ(80、 280、 480、 680ミリ秒)を予め決まった順序で繰り返し呈示するシリアル条件とランダムに呈示するランダム条件を比較しました。その結果、シリアル条件では固有感覚ドリフトを認めなかったのに対し、ランダム条件では有意なドリフトを認めました。しかし、いずれの条件でも、被験者は人工手を自分の手のように錯覚しませんでした。
これらの結果は、身体意識と固有感覚ドリフトの発生機序が独立していること、視触覚刺激のタイミングのずれを予測できるとき(シリアル条件)、固有感覚ドリフトに関わる視覚-固有感覚統合の抑制が起こるのに対し、ずれを予測できないとき(ランダム条件)には抑制が生じにくいこと、を示唆しています。本研究は、予測という脳のトップダウンの処理が身体部位の位置知覚に関わる視覚-固有感覚統合に与える影響を明らかにした点がユニークであると思います。今後は、ヒトの他の知覚や意識の脳基盤解明に結び付くことが期待されます。
掲載論文
| 発表雑誌: | Frontiers in Psychology [12 November 2021] |
| 論文タイトル: | Predictability of delayed visual feedback under rubber hand illusion modulates localization but not ownership of the hand |
| 筆 者: | Satoshi Shibuya, Satoshi Unenaka, Yukari Ohki (渋谷賢1、畝中智志2、大木紫1(1統合生理学教室、2北翔大学)) |
| DOI: | 10.3389/fpsyg.2021.771284 |
問い合わせ先
杏林学園広報室
広報室へのお問い合わせはこちらまで